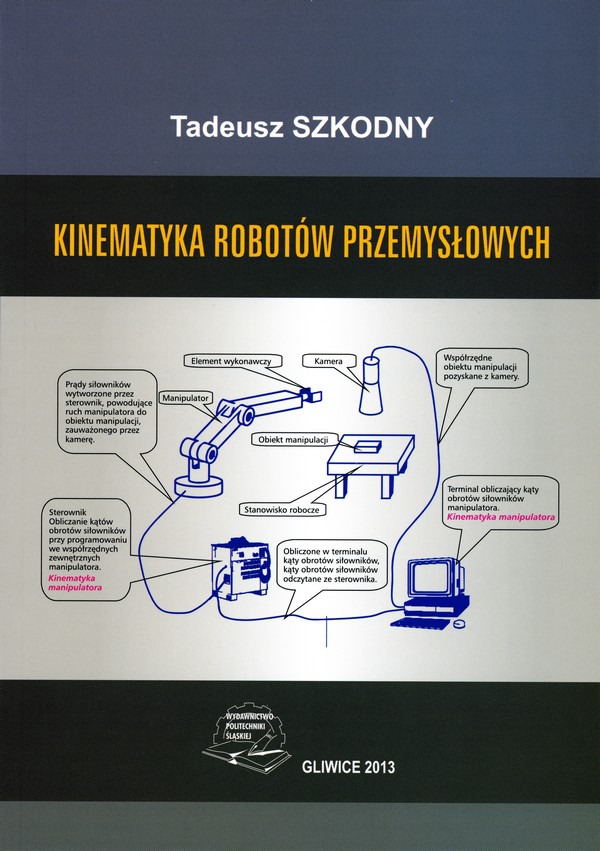
Kinematyka robotów przemysłowych
Wydział: Automatyka » Książki
Tematyka: Automatyka i robotyka
Książka jest próbą wypełnienia luki na rynku krajowym w zakresie opisu kinematyki manipulatorów do tworzenia oprogramowania sterującego robotami przemysłowymi. Do modelowania zastosowano macierze jednorodne. Metody opisu kinematyki przedstawiono na przykładzie manipulatorów z czterema, pięcioma i sześcioma stopniami swobody, z napędami pośrednimi.
ISBN: 978-83-7880-134-4
format: B5
oprawa: miękka
rok wydania: 2013
wydanie: II